OpenPIV tutorial¶
In this tutorial we read a pair of images and perform the PIV using a standard algorithm. At the end, the velocity vector field is plotted.
[21]:
from openpiv import tools, pyprocess, validation, filters, scaling
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
import imageio
import importlib_resources
import pathlib
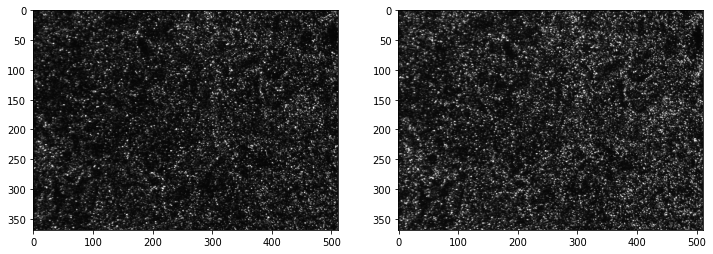
Reading images:¶
The images can be read using the imread function, and diplayed with matplotlib.
[22]:
path = importlib_resources.files('openpiv')
[23]:
frame_a = tools.imread( path / 'data/test1/exp1_001_a.bmp' )
frame_b = tools.imread( path / 'data/test1/exp1_001_b.bmp' )
fig,ax = plt.subplots(1,2,figsize=(12,10))
ax[0].imshow(frame_a,cmap=plt.cm.gray);
ax[1].imshow(frame_b,cmap=plt.cm.gray);
Processing¶
In this tutorial, we are going to use the extended_search_area_piv function, wich is a standard PIV cross-correlation algorithm.
This function allows the search area (search_area_size) in the second frame to be larger than the interrogation window in the first frame (window_size). Also, the search areas can overlap (overlap).
The extended_search_area_piv function will return three arrays. 1. The u component of the velocity vectors 2. The v component of the velocity vectors 3. The signal-to-noise ratio (S2N) of the cross-correlation map of each vector. The higher the S2N of a vector, the higher the probability that its magnitude and direction are correct.
[24]:
winsize = 32 # pixels, interrogation window size in frame A
searchsize = 38 # pixels, search area size in frame B
overlap = 17 # pixels, 50% overlap
dt = 0.02 # sec, time interval between the two frames
u0, v0, sig2noise = pyprocess.extended_search_area_piv(
frame_a.astype(np.int32),
frame_b.astype(np.int32),
window_size=winsize,
overlap=overlap,
dt=dt,
search_area_size=searchsize,
sig2noise_method='peak2peak',
)
The function get_coordinates finds the center of each interrogation window. This will be useful later on when plotting the vector field.
[25]:
x, y = pyprocess.get_coordinates(
image_size=frame_a.shape,
search_area_size=searchsize,
overlap=overlap,
)
Post-processing¶
Strictly speaking, we are ready to plot the vector field. But before we do that, we can perform some convenient pos-processing.
To start, lets use the function sig2noise_val to get a mask indicating which vectors have a minimum amount of S2N. Vectors below a certain threshold are substituted by NaN. If you are not sure about which threshold value to use, try taking a look at the S2N histogram with:
plt.hist(sig2noise.flatten())
[26]:
invalid_mask = validation.sig2noise_val(
sig2noise,
threshold = 1.05,
)
Another useful function is replace_outliers, which will find outlier vectors, and substitute them by an average of neighboring vectors. The larger the kernel_size the larger is the considered neighborhood. This function uses an iterative image inpainting algorithm. The amount of iterations can be chosen via max_iter.
[27]:
u2, v2 = filters.replace_outliers(
u0, v0,
invalid_mask,
method='localmean',
max_iter=3,
kernel_size=3,
)
Next, we are going to convert pixels to millimeters, and flip the coordinate system such that the origin becomes the bottom left corner of the image.
[28]:
# convert x,y to mm
# convert u,v to mm/sec
x, y, u3, v3 = scaling.uniform(
x, y, u2, v2,
scaling_factor = 96.52, # 96.52 pixels/millimeter
)
# 0,0 shall be bottom left, positive rotation rate is counterclockwise
x, y, u3, v3 = tools.transform_coordinates(x, y, u3, v3)
Results¶
The function save is used to save the vector field to a ASCII tabular file. The coordinates and S2N mask are also saved.
[29]:
tools.save('exp1_001.txt' , x, y, u3, v3, invalid_mask)
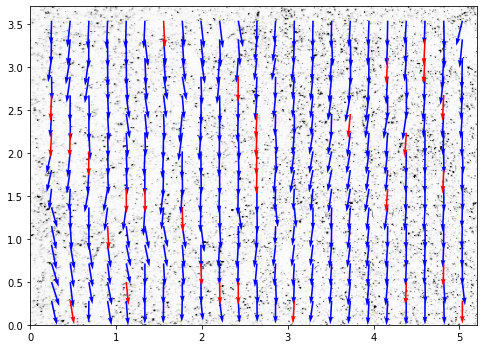
Finally, the vector field can be plotted with display_vector_field.
Vectors with S2N bellow the threshold are displayed in red.
[30]:
fig, ax = plt.subplots(figsize=(8,8))
tools.display_vector_field(
pathlib.Path('exp1_001.txt'),
ax=ax, scaling_factor=96.52,
scale=50, # scale defines here the arrow length
width=0.0035, # width is the thickness of the arrow
on_img=True, # overlay on the image
image_name= str(path / 'data'/'test1'/'exp1_001_a.bmp'),
);